Spencer Folk

I am currently a Ph.D. Candidate in the GRASP Lab at the University of Pennsylvania, where I am co-advised by Vijay Kumar and Mark Yim. Broadly speaking, my dissertation research investigates how wind affects perception, motion planning, and control for UAVs operating in cluttered environments. Through my work, I strive to enable UAVs to reason about the complex wind patterns that arise in the urban canopy layer in real time using onboard sensing and computation, and to use this enhanced environmental awareness to operate safely, efficiently, and autonomously in future urban airspaces.
In addition to my role at GRASP, I work with NASA as a Pathways intern on projects utilizing UAVs as mobile in-situ wind sensors. These initiatives aim to improve the accuracy and timeliness of urban weather forecasts, inform policy for future urban airspaces, and catalyze advancements in urban air mobility technologies. Before the Ph.D., I performed research for the U.S. Army Research Laboratory centered on the design and performance analysis of 3D printed UAVs.
While my recent work is tailored towards urban air mobility, I’m passionate about all aspects of autonomous flight and its potential applications in society and beyond. On this website, you’ll find a collection of my publications and a portfolio of a variety of engineering projects I’ve worked on over the years. Enjoy!
Updates
| Oct 27, 2025 | I was invited to speak about my dissertation research at the 2025 INFORMS Annual Meeting in Atlanta, GA! My talk primarily focused on my recent ICRA paper. |
|---|---|
| Mar 26, 2025 | I was an invited speaker at the first East Coast Meetup for the Dronecode Foundation held in Philadelphia! |
| Jan 27, 2025 | My paper titled “Towards Safe and Energy-Efficient Real-Time Motion Planning in Windy Urban Environments” was accepted for presentation at IEEE ICRA 2025 in Atlanta, GA! This paper is a follow-up to my previous IEEE RAL paper, which will also be making an appearance. |
| Nov 26, 2024 | I finally got around to publishing RotorPy on the Python package manager PyPI, which means you can now install it anywhere with pip. |
| Nov 06, 2024 | Our paper titled “OCCAM: Online Continuous Controller Adaptation with Meta-Learned Models” was selected among just 30 papers for an oral presentation at the Conference on Robot Learning (CoRL)! |
Selected Publications
- CoRL 2024
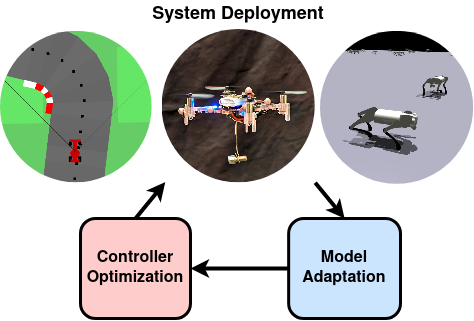 OCCAM: Online Continuous Controller Adaptation with Meta-Learned Models8th Annual Conference on Robot Learning, 2024
OCCAM: Online Continuous Controller Adaptation with Meta-Learned Models8th Annual Conference on Robot Learning, 2024




